Forum Replies Created
-
AuthorPosts
-
Sometimes contractors are required to manually verify the counts and average speeds of traffic on a lane by lane basis over a specified amount of time (e.g. 15 minutes or 100 vehicle, whichever occurs first).
To assist with this, we have a “validation tool” built into the Range Plot (live view) of the SpeedLane Configurator tool. To use this tool, watch a short video:
in reply to: Doppler Radar Reading High Speeds #2557Please connect to the radar via our Stats Analyzer Windows program that you can download from this website. Once you connect to the radar this option is found on the “Radar Setup” tab.
Yes, this is possible by following the steps below:
- Create a project and import the data from one radar into it.
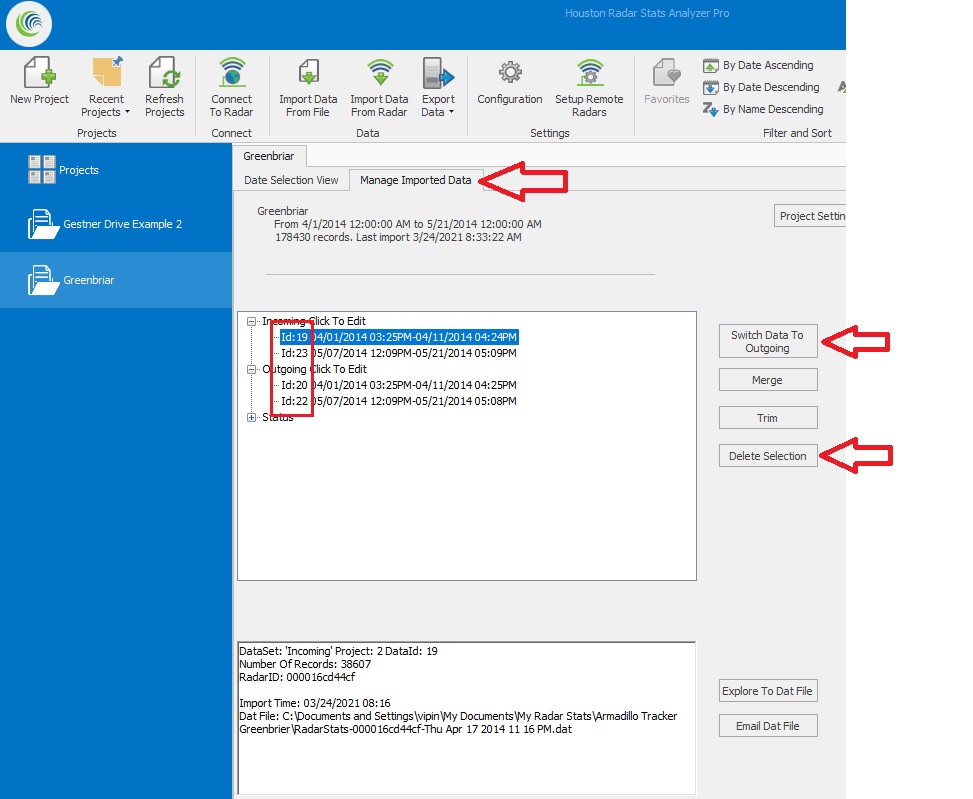
- Click on the “Manage Imported Data” tab.
- Select the direction you do NOT want to keep from this import (e.g. if the closer lanes are incoming, you want to delete the outgoing lanes as they will not have accurate data and you’ll get the outgoing data from the other device mounted on the other side of the road). Delete this direction data.
- Import the data from the other radar (that’s mounted on the other side) into this same project.
- Click on “Manage Imported Data” tab again and delete the direction you do not want (keep the closer lanes and delete the far lanes going the other way). This is possible as each imported data set is kept separate in the “Manage Imported Data” tab. They are assigned different ID’s (see image below).
- If the two radars were mounted in opposite directions (so closer lanes are incoming for both), you would want to use the “Switch Data” button to either switch incoming to outgoing or vice-a-versa. Obviously to keep the incoming lanes separate you want to be sure data from one radar is in one direction and the data from the other radar is in the other direction (if they are in the same direction the data will be merged in the report).
- Now do your analysis as usual.
 in reply to: 4 lane road collection #2201
in reply to: 4 lane road collection #2201The Armadillo Tracker collects data by direction. So any target within “range” will get counted and stored by direction.
So the outgoing direction will not get merged with the incoming direction. However, some vehicles from the outgoing direction will be logged as they will not all be out of range (from our tests, the outgoing- lane 3 & 4 accuracy will be around 60 to 70%- which is not within our spec). However we would recommend deleting these outgoing vehicles once data is imported into a project. You can delete all data by direction in the project and use the incoming (lane 1 & 2) data.
The one-tap operations share feature uses the default share app. In order to change the default share app, you should connect with a device, go to the download data screen (do not use ‘Play’ this one time), download some data and then select the “share” button on the bottom (the one that is shaped like a less than sign with a solid circle at each corner).
Use your new gmail app & email to share the data. Once the data is shared the app used will become the default share app. The next time you execute the one-tap operations it will use the newly selected default app (gmail now). If the gmail app is not using your gmail email address then you will need to change that in the gmail app settings.
in reply to: TS500 Problems #1846The first thing to determine would be if the USB to serial is working.
We suggest using TeraTerm terminal program to open the serial port. If you do not get any error in opening the serial port, set the serial port settings to 115200,no parity, 8 data bits, 1 stop bit, no hardware handshaking. (115200,N,8,1)
Then with the port open and the unit connected power cycle the simulator. On startup it print out the version number of the firmware. You can also type help in the simulator. You should see a response.
If you do not see any activity on the terminal program, check the power going to the unit and the cabling/wiring. Since both units were working and now are not working, there is something wrong with either the USB to serial, the cabling, the power going to the unit or the cable/wire hookup.
in reply to: Tetryon software #473Tetryon software is Linux (Ubuntu) based software that may be run either in the cloud or on a physical computer in your IT department that aggregates data from multiple SpeedLane and Armadillo Tracker devices into one location. The data is stored in MySQL database on the server.
It features a rich GUI to show a dashboard view of the multiple devices calling the server as well as plot live and historical data.
in reply to: Enable Per Vehicle Data Sync In Tetryon #471Yes, the Tetryon can sync per vehicle data from radars that can collect this information.
As of this moment, these are the SpeedLane Pro and Armadillo Tracker products.
However, by default, per vehicle data sync is disabled for the SpeedLane Pro and only binned data is synced. This is for two reasons:
- All reports and graphs in the Tetryon GUI are generated from binned data.
- Per vehicle data is significantly more voluminous than binned data. For example, you require a 20MB/month data plan for binned data regardless of number of vehicles per day. Per vehicle syncing requires approximately 100MB per 1 million vehicles recorded.
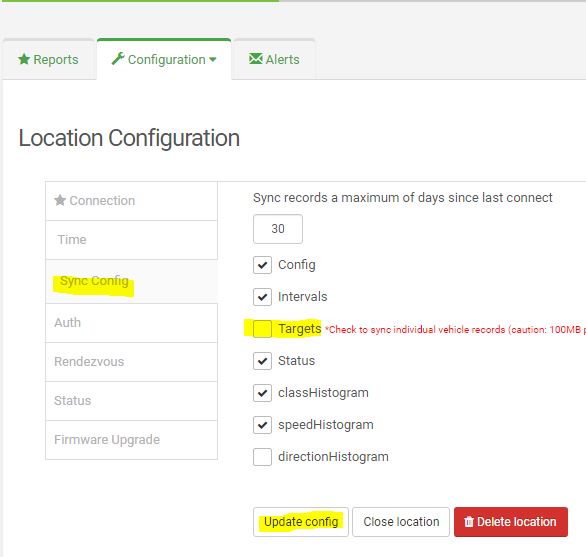
If you need to sync per vehicle data, follow the steps below to configure it in the Tetryon:
- Log in to your Tetryon account as site admin or customer account admin
- Click on the location you want to sync per vehicle data. This feature must be enabled on a location by location basis.
- Click on the Location Configuration Tab.
- Click on the Sync Configuration tab.
- Check the “Targets” checkbox.
- Click the “Update Config” button.
See image below.
You may install the server software on a physical computer. While it may be, it need not be installed in the cloud. We also now support Ubuntu 18.04 LTS.
We can provide the Tetryon installer via email. Please send request to info@houston-radar.com.
Please include your name, company name and if you have purchased the SpeedLane Pro units, the serial numbers. We will get in touch asap.
You can connect to the radar via the Houston Radar Stats Analyzer by using the Tetryon’s ‘Rendezvous’ functionality. You configure the Tetryon location that you want to Rendezvous with (when the radar next calls in). The Tetryon will hold the connection and open a port for you to connect to. You connect to this port (in the Tetryon, not the radar) using the Houston Radar Stats Analyzer Configuration tool (using the Remote radar feature).
The Tetryon will then connect the two sockets behind the scenes. The only functionality not yet available is video streaming. However, you can take snapshots or do any other configuration changes that you otherwise could if you were connected directly.
Here is a brief video demonstrating this:
-
This reply was modified 3 years, 6 months ago by
Vipin Malik.
-
This reply was modified 3 years, 6 months ago by
-
This reply was modified 3 years, 6 months ago by
-
This reply was modified 3 years, 6 months ago by
-
This reply was modified 3 years, 6 months ago by
-
This reply was modified 3 years, 6 months ago by
-
This reply was modified 1 year, 9 months ago by
-
This reply was modified 1 year, 9 months ago by
-
This reply was modified 1 year, 9 months ago by
in reply to: How can data be downloaded as a CSV file? #413You can use the Houston Radar Stats Analyzer program to connect to, download data and analyze and generate reports including raw data output from a “Stat Track” data collector.
We have a user manual that describes the general use of the Houston Radar Stats Analyzer program on the product page (see downloads tab):
https://houston-radar.com/products/software/stats-analyzer-configuration-software/
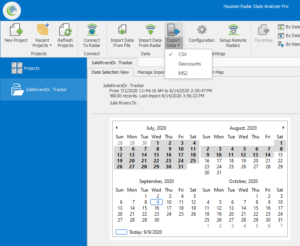
To export raw data, please follow the general directions in the above user manual to create a project and import data into this project.
Once the data is imported, please click on “Export” button in the top ribbon. You may select one of the available export options. “csv” is one of the available options.
 in reply to: What is 85th Percentile Speed? #404
in reply to: What is 85th Percentile Speed? #404The 85th percentile speed is the actual speed of the 85th percent vehicle in the data set which is sorted by speed.
In other words, if we have (say) 1053 vehicles in the data set. The 85th percent vehicle would be vehicle #895 (1053*.85).
The software will sort all the vehicles in the data set in increasing order by speed and pick the actual speed of vehicle #895 in this sorted list. This is the 85th percentile speed value.
The reason this speed is important is that studies have shown that this is the safest speed that drivers will self select when given an opportunity to pick their speeds on any given road. Many jurisdictions set the road speed limit at or very close to this value.
in reply to: Increase Detection Rage for PD420 Radar #369The PD420 is capable of detection to past 255 feet. The default configuration can detect a vehicle sized target out to ~300 to ~315 feet.
However, in the default configuration the lane variables can only be set to a maximum of 255 feet (start and stop range) as the lower byte of the L1 through L6 variable specified the lane start in feet and the upper byte specified the lane stop in feet. A byte can only hold a maximum value of 255.
However, starting from firmware version 152 and higher, you can change the behavior of the L1 through L6 variables that define the lane start/stop range for the 6 lanes.
If you set bit #10 (counting from 0) in the MD variable, the L1 through L6 variables operate as following:
Lower 9 bits hold the lane start in feet
Upper 7 bits hold the lane width in feet
You don’t need to do this calculation manually. Simply install the latest version of the Houston Radar Stats Analyzer/Configuration tool and if this bit is set, the GUI will allow you to set lane starts out to 512 feet.
The attached radar configuration file can be downloaded to the radar and will set MD to this correct “range extended” value.
RadarConfiguration-ExtendPD420LaneRangeSetup.rcfg
It is possible to extend the detection past the ~320 feet as well (to perhaps 400+ feet depending on target). Please contact us if you have an application for this.
There is no material trade-off just to extending the lane start to 512 feet (except lanes can now only be a maximum of 127 feet wide- probably not an issue as you can set up multiple lanes). However, if you wish to extend the detection past the ~320 feet value, you will have to sacrifice the range resolution. Please contact us via email if you wish this discuss this further.
-
This reply was modified 3 years, 6 months ago by
-
This reply was modified 3 years, 6 months ago by
-
This reply was modified 3 years, 6 months ago by
in reply to: Doppler Radar Reading High Speeds #365It’s possible that the radar is measuring the speed of the top of the wheel of the vehicle.
The axle of the wheel travels at the speed of the vehicle. However the top of the wheel travels at twice the speed. So if the wheel is large and exposed (for example in a tractor or 18 wheeler or Mule), there may be enough of a reflection off the top (treads or bolts near the top) that the radar will be able to track those speeds.
All our Doppler radars track multiple targets internally but send out the speed of only one target. The target selected for speed output is based on the user selection of “Select Strongest” or “Select Fastest”. If you are getting fast speeds, please check to see if the current selection is “Select Fastest”. If so, try changing it to “Select Strongest”. The reflection from the wheel will always be weaker than the reflection from the body. Thus selecting to output the speed of the “Strongest” target will usually fix this issue.
-
This reply was modified 3 years, 6 months ago by
All speed measurement devices measure relative velocity between the measurement device and the target. This means that if the radar is moving (e.g. mounted on a moving vehicle) it will measure the (vector or signed) speed difference between itself and the target.
Thus, if the radar is mounted rear facing on a vehicle and vehicle is moving on the road at (say) 30 mph, and another vehicle is approaching from behind at (say) 60 mph the radar will read (60-30) or 30 mph.
If you want to read the correct speed of the approaching vehicle, our SS400 radar features “ground speed correction”. When enabled (via the user configuration GUI), the radar will track its own speed by tracking the outgoing ground speed and will correct the speed of the incoming vehicle by its own speed and read the correct target speed of 60 mph.
This allows you to mount the SS400 in a “You Speed Is” speed sign on the back of a truck and track and show correct speeds of fast vehicles approaching from behind. The SS400 radar is also available in our PNL10 two digit display which makes for an easy to use kit to make your own “Your Speed Is” sign.
-
This reply was modified 3 years, 1 month ago by
George Meszaros.
-
AuthorPosts
